1.6 未来功能与展望(Future functions and prospects)
1.6.1 兼容ROS的顶层视觉/决策算法开发(ROS compatible top-level vision/decision algorithm development)

- 单电脑下开发&测试单一视觉功能,成本低、效率高;Windows下开发,易用强、门槛低;
- 多硬件下测试整个视觉&决策整体,更逼真、高可信;Linux/ROS下开发,本符合实际开发。
1.6.2 可靠视觉算法真机迁移流程(Reliable vision algorithm real machine migration process)
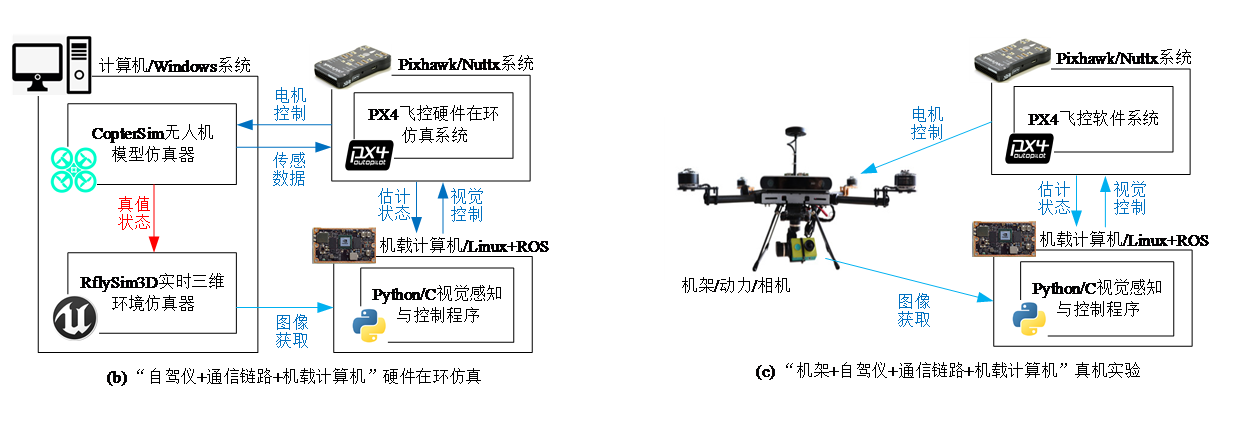
- 直接将Pixhawk/PX4飞控的输出插在电调,图像获取接口连接相机,即可完成真机迁移。优点:无缝衔接,不需要任何额外修改,高逼真的三维场景。
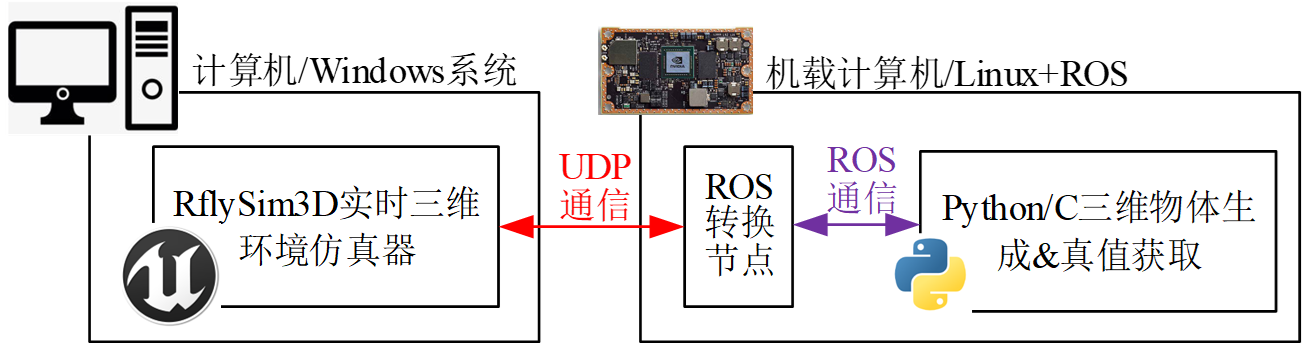
1.6.3 环境场景/障碍物的动态生成与配置(Dynamic generation and configuration of environment scenarios/obstacles)
- 支持通过UDP/ROS动态改变场景地图、改变飞机三维样式、动态创建障碍物(其他飞机、跟踪靶标、人物、标定板、桌椅等)、动态改变飞机视角(位置、方向、焦距等)、改变三维引擎输出图像分辨率等。
1.6.4 外部传感器支持(External sensor support)
- 传感器数据分为两类:直连飞控的外部传感器(磁罗盘、差分GPS、光流测速等),另一类是直连机载计算机的视觉传感器(双目、Lidar、深度相机等)。
- 飞控传感器通过Simulink等程序直接生成传入Pixhawk飞控。
- 视觉传感器通过RflySim3D三维环境引擎生成,随图像传入机载计算机。

注:我们的RflySim3D三维环境引擎和Airsim一样都是基于Unreal Engine 4开发的,因此可以支持所有Airsim已有的传感器。
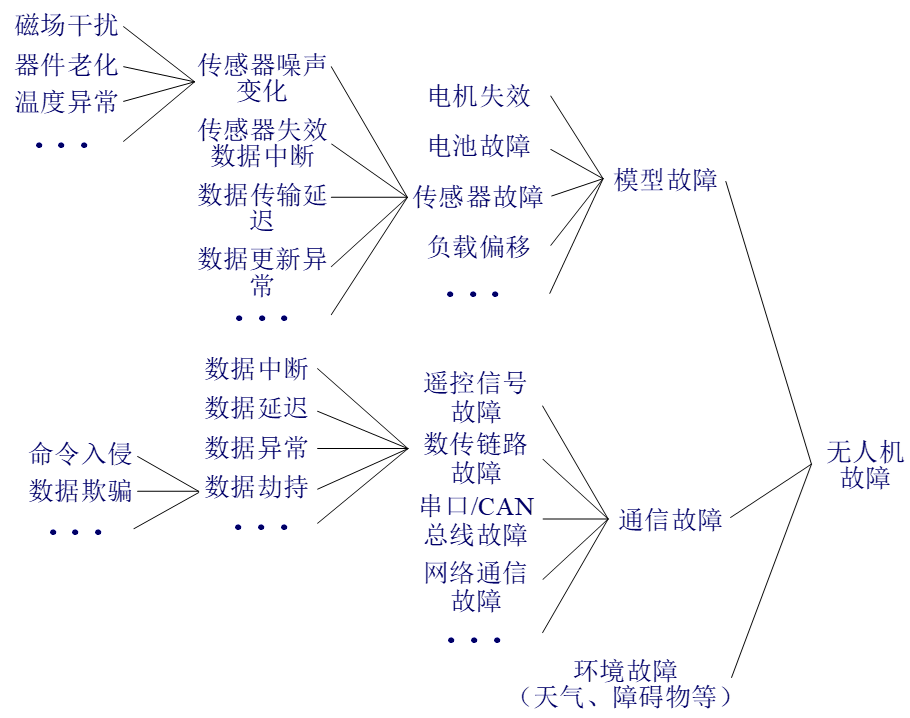
1.6.5 故障建模与注入(Fault modeling and injection)
- 除了基础功能的测试,无人机的故障情况下的安全/可靠性测试也至关重要。
- 本系统将故障总结为三类:
- 模型故障(与飞机数学模型有关)
- 通信故障(与数据交互传输有关)
- 环境故障(与三维场景有关)
5.5 故障建模与注入(Fault modeling and injection)
故障模拟&评估
- 模型故障:提供Simulink模型和外部触发接口,可自行加入任意故障。
- 通信故障:所有通信链路经过统一接口转发,可模拟延迟、丢包等
- 环境故障:障碍物等在三维引擎中生成
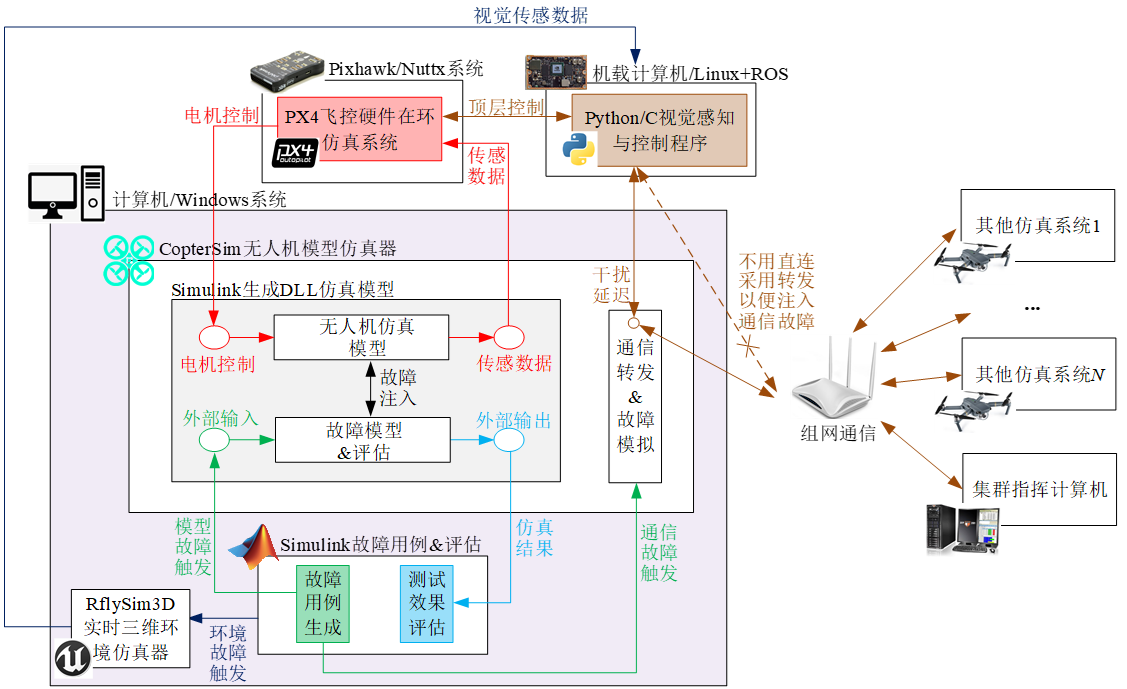
1.6.6 分布式仿真框架(Distributed Simulation Framework )

无视觉集群编队

带视觉无人机蜂群探索
1.6.7 分布式通信优化(Distributed communication optimization)
- 本电脑内部各个程序间的通信采用共享内存方式,直接在内存上操作,延迟最低、速度最快。
- 每台电脑可以开启多个硬/软件在环仿真系统,模拟多个无人机。
- 每台电脑向外收发数据经过汇总、压缩等,确保网内通信顺畅。
- 采用请求式通信(DDS协议),支持千架级别仿真。

1.6.8 FPGA实时仿真系统,脱离PX4限制,支持其他飞控硬件(FPGA real-time simulation system, separated from the PX4 limit, support other flight control hardware)


仿真可信度保证:
仿真平台本身需要具备足够的可信度。
硬件层面:硬件结构需要尽量接近真实系统。
软件层面:仿真程序的开发流程需要足够标准可信。
数学仿真模型需要足够精确、可信。