
飞思X450
1.产品介绍
飞思X450无人机平台专业的室外小型智能四旋翼无人机,对称电机轴距450mm,整机模块化设计,在搭载机载计算机的同时,配备搭载深度相机和激光雷达等功能模块,形成完善的室外智能飞行器,优异的产品性能可以应对复杂的室外飞行环境,是面向室外集群编队算法开发、slam导航等研究领域的智能飞行器科研平台。

2.核心优势&科研方向
- 基于模型设计开发;
- 无人机集中式/分布式集群控制;
- 视觉slam导航、激光slam导航开发;
- 支持ROS二次开发
- 支持matlab开发
注:飞思X450无人机采用racer飞控,其具体详细配置方法可参考X310飞机,遥控器操作可参考6.1遥控器配置中的乐迪ATS9Pro遥控器或者天地飞ET07遥控
3.版本与性能
| 产品配置 | 领航版 | 旗舰版 | 高阶版 |
| 基础配置 | 光流定点、激光定高、外置磁罗盘 | ||
| 飞控 | Racer飞控 | ||
| 机载板卡 | NX Xavier | ||
| 视觉里程计 | T265相机 | ||
| 空间探测 | D435i深度相机 | 思岚S1激光雷达 | D435i深度相机 思岚S1激光雷达 |
| 定位系统 | GPS/RTK | ||
| 通讯链路 | 200m范围内—板载WiFi;3km—ZY-H3;10km—ZY-H12 | ||
| 基础软件环境 | 各传感器驱动 无人机offboard控制示例程序 | ||
| 功能特点 | 可进行长达二十多分钟续航的室外集群编队飞行控制;单机实现视觉slam导航算法验证与开发 | 室外集群编队飞行控制;单机实现激光slam导航算法验证与开发 | 在集群的功能基础上,单机同时实现视觉slam导航、激光slam导航算法验证与开发功能 |
4.飞行器指标
| 飞思X450智能无人机 | |
| 尺寸(不含桨) | 420*420*240mm |
| 对称电机轴距 | 450mm |
| 飞行器重量 | 1200g |
| 电池 | 6s,6000mAh,862g |
| 整机重量(含电池) | 2062g |
| 额外最大载重 | 1000g |
| 定位精度 | GPS:垂直:±0.5m;水平:±2m |
| RTK:垂直:±3cm;水平:±5cm | |
| 最大上升速度 | 2m/s |
| 最大下降速度 | 2m/s |
| 最大水平飞行速度 | 8m/s |
| 最大起飞海拔高度 | 4000m |
| 续航时间(空载) | 30分钟 |
| 工作环境温度 | -20°C至 50°C |
5.应用场景
完善的室外小型无人机集群协同编队科研解决方案,适合高等院校教学科研,以及军工单位科研,应用于Slam算法开发/验证;路径规划/避障算法开发;AI算法开发/验证等领域。
6 实飞调试
飞思X450飞机的官方固件和参数文件可点击FLY_X450进行下载,下载完成后,通过解压即可看到如下文件。

上述两个文件分别为:X450飞机参数文件和卓翼H7官方实飞固件文件。具体操作如下:
Step 1:
检查飞机外观和各部件状态,请确保飞机在各部件良好的状态下进行下一步。
Step 2:
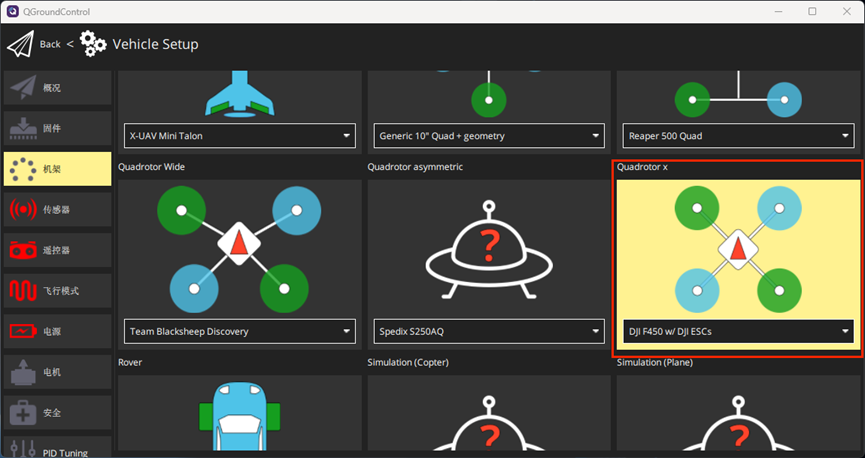
将飞机通过USB与电脑进行连接,打开QGC软件,设置机架为:DJI F450 w/ DJI ESCs;
Step 3:
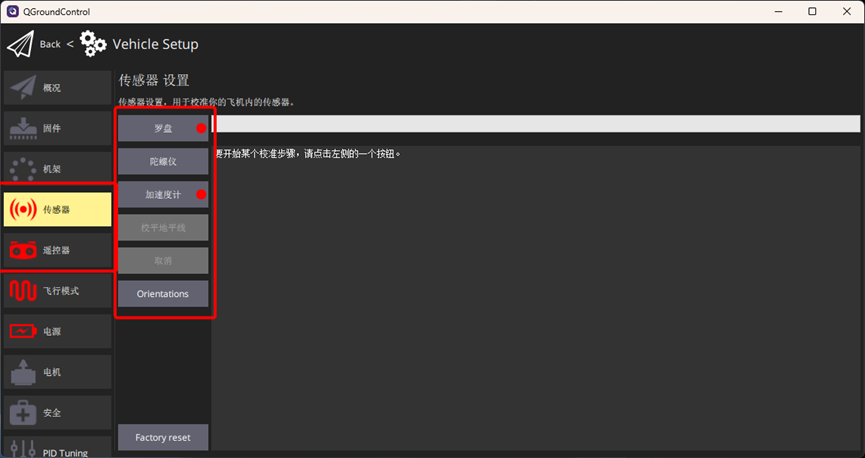
依次校核传感器、遥控器和电池。
Step 4:
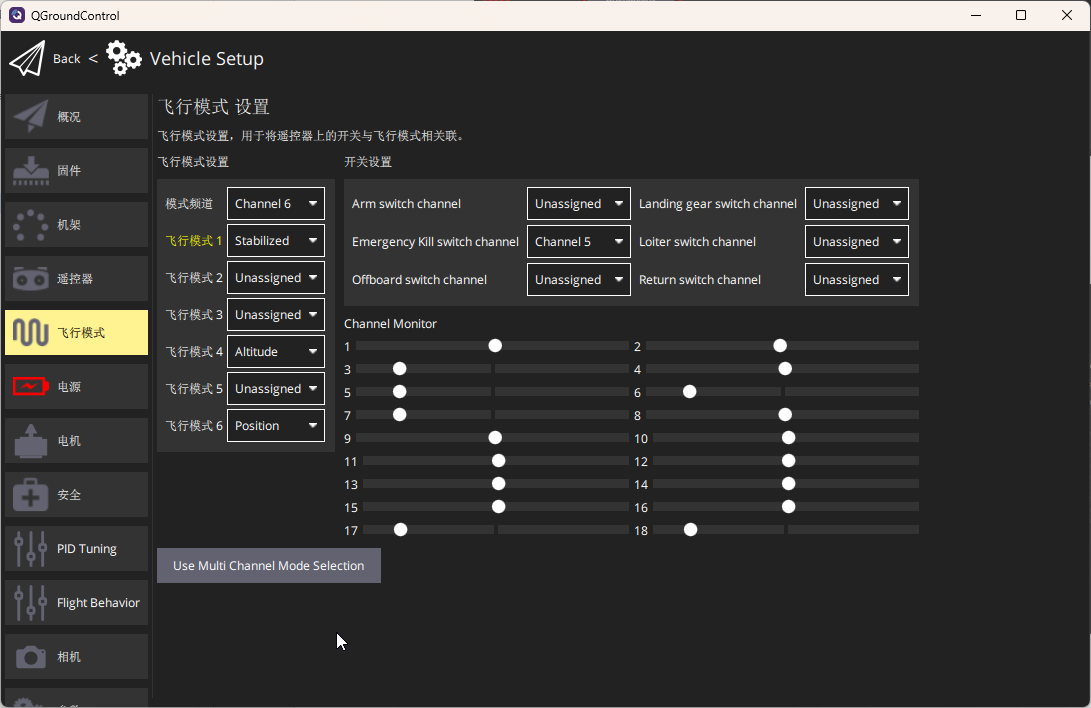
设置飞行模式如下图所示,遥控各通道设置请参考文件:遥控器使用手册。
Step 5:
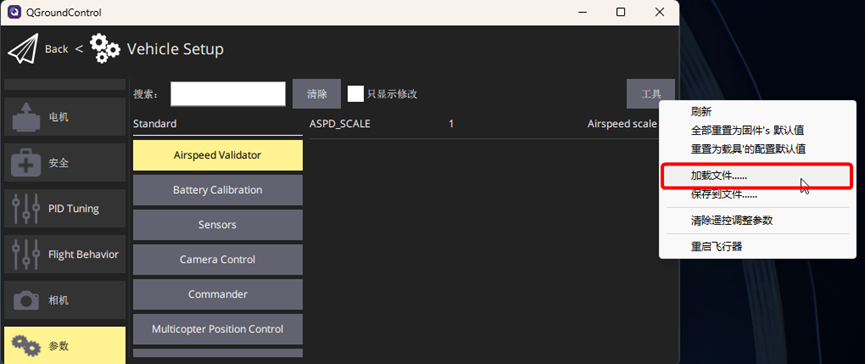
选择加载本例程文件夹下的参数文件:X450.params文件。
加载成功后,断开飞机电源进行重启,再次进行连接飞机确保所有设置均已完成。
Step 6:
请在室外指定飞场或空阔地区,飞机上电后,遥控器“内八”进行解锁,如下图所示。解锁完成后可看到无人机螺旋桨开始低速转动。推动遥控器CH3油门通道,即可看到无人机开始起飞。

通过切换CH6通道,即可实现在自稳、定高、定点模式下自由切换。